
因為BCNC 支援多款平台,像WINDOWS,LINUX,Mac OSX,OpenBSD, 連 Raspberry Pi,BananaPi都有支援,所以可以在系統旁作個小型控制台,而各系統的安裝方式在 BCNC OS 都有詳細說明.
- BCNC 能夠 跨平台是因為程式是用 python 撰寫 ,所以你要先安裝 python 而版本 V2 或V3 都可以執行,但原創人是在V2下測試時間較長所以強烈建議安裝V2的最新版本的Python。
- 並且要安裝pyserial,安裝相同版本的Python的pyserial。可從終端(CMD),執行命令(其中PythonXX是你的Python安裝目錄)
C:\PythonXX\Scripts\easy_install pyserial- 下載BCNC並複製到系統中。
下表為使用者回饋各版本的運作狀態,供參考:
| OS | Python | Notes |
|---|---|---|
| Windows XP SP3 | 2.7.5 | |
| Windows Vista SP2 | 2.7.9 | |
| Windows 7 | 2.7.* | Any 2.7 version should work |
| Windows 8.1 | 2.7.10 is known to work | |
| Windows 10 | 2.7.* | Any 2.7 version should work |

從畫面可以看到 Not Connected,表示尚未連線.
點選 File 分頁可以看到serial 設定
Port :會依硬體偵測有效的Port
Baud:115200(v0.9g 開始支援 115200的速率)
Baud:115200(v0.9g 開始支援 115200的速率)
Controller:Grbl(因為軔體是GRBL)

按下OPEN ICO  就會出現Connected
就會出現Connected
就會出現Connected
按下右上角的Terminal分頁,就可以叫出控制台(G-CODE指令)

在右下角Command 輸入$$ 就可以叫出GRBL 軔體的設定參數:

下列是我 GRBL 的軔體參數
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=0 (dir port invert mask:00000000)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.010 (junction deviation, mm)
$12=0.002 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=1 (soft limits, bool)
$21=1 (hard limits, bool)
$22=1 (homing cycle, bool)
$23=3 (homing dir invert mask:00000011)
$24=25.000 (homing feed, mm/min)
$25=300.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=5120.000 (x, step/mm) X軸馬達每公厘,需要步數
$101=5120.000 (y, step/mm) Y軸馬達每公厘,需要步數
$102=9600.000 (z, step/mm) Z軸馬達每公厘,需要步數
$110=200.000 (x max rate, mm/min) X軸位移速度
$111=200.000 (y max rate, mm/min) Y軸位移速度
$112=100.000 (z max rate, mm/min) Z軸位移速度
$120=10.000 (x accel, mm/sec^2) X軸加速度
$121=10.000 (y accel, mm/sec^2) Y軸加速度
$122=10.000 (z accel, mm/sec^2) Z軸加速度
$130=160.000 (x max travel, mm) X軸最大行程
$131=100.000 (y max travel, mm) Y軸最大行程
$132=40.000 (z max travel, mm) Z軸最大行程
$100~$132 為馬達位移參數~都可以依自己的硬體規劃而改變
如Z軸高度 只要在 Command 輸出 $$132=50 就可以改變 Z軸行程高為為50mm
當然,你的硬體要能夠有Z軸要有50mm行程~~不然就會出現 Alram
而BCNC 把一些常用的指令也作成ICO 方便使用。

接下來就要設定BCNC軟體參數, 選擇 Tools 分頁 按下 Machine 就可以叫出BCNC 的軟體設定
或是直接 用文字編輯 軟體 去在 解壓縮後的 BCNC 目錄下的 .bCNC 檔, (記得設定完成後,要重新啟動 bCNC 設定才會生效哦~~
或是直接 用文字編輯 軟體 去在 解壓縮後的 BCNC 目錄下的 .bCNC 檔, (記得設定完成後,要重新啟動 bCNC 設定才會生效哦~~

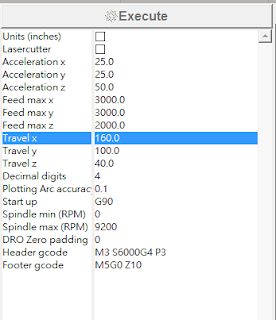
而bCNC 設定主要改變 工作平台的尺寸 來符合 Cyclone 硬體的工作平台的尺寸及主軸轉速及開始G-COED跟結束G-COED
Travel X :(工作平台的寬度 mm)
Travel Y :(工作平台的深度 mm)
Travel Z :(工作平台的高度 mm)
Spindle min (RPM):主軸最小轉速
Spindle max (RPM):主軸最大轉速
Header gcode:開始G-COED
G94 ( Millimeters per minute feed rate. )
G21 ( Units == Millimeters. )
G90 ( Absolute coordinates. )
S3000 ( RPM spindle speed. )
F60.00000 ( Feedrate. )
M5 (Spindle stop.)
M3 ( Spindle on clockwise. )
G04 P0 ( dwell for no time -- G64 should not smooth over this point )
G00 Z5.00000 ( retract )
Footer gcode:結束G-COED
M5 ( Spindle off. )
M9 ( Coolant off. )
M2 ( Program end. )
記得設定完成後,要重新啟動 bCNC 設定才會生效哦~~
重新啟動 bCNC.就會看到

Travel X :(工作平台的寬度 mm)
Travel Y :(工作平台的深度 mm)
Travel Z :(工作平台的高度 mm)
Spindle min (RPM):主軸最小轉速
Spindle max (RPM):主軸最大轉速
Header gcode:開始G-COED
G94 ( Millimeters per minute feed rate. )
G21 ( Units == Millimeters. )
G90 ( Absolute coordinates. )
S3000 ( RPM spindle speed. )
F60.00000 ( Feedrate. )
M5 (Spindle stop.)
M3 ( Spindle on clockwise. )
G04 P0 ( dwell for no time -- G64 should not smooth over this point )
G00 Z5.00000 ( retract )
Footer gcode:結束G-COED
M5 ( Spindle off. )
M9 ( Coolant off. )
M2 ( Program end. )

記得設定完成後,要重新啟動 bCNC 設定才會生效哦~~
重新啟動 bCNC.就會看到


此時再按下 Home 就可以看到 Z軸移動,去觸動 End-stop 然後 XY軸同動去歸零.

接下來可以進行 雕刻.
待續... BCNC 壓克力雕刻教學..
待續... BCNC 壓克力雕刻教學..
3 則留言:
超棒的,謝謝分享。
你好
最近我也在實作這台
但電控不熟,在裝endstop 時不知道要插在CNC shield 上的那哪
想問能分享CNC shield 上的配線圖嗎?
謝謝您
我自己找到了
謝謝!
張貼留言